
La braquistócrona, un problema clásico del cálculo de variaciones y algunos aspectos generales
Correspondencia para los autores: aaraujo@campestre.edu.co
Recibido: 12 de febrero de 2024
Aceptado:12 de abril de 2024

Tabla de contenido
1. RESUMEN
El problema de la braquistócrona fue uno de los primeros problemas planteados en el cálculo de las variaciones. Newton tuvo el desafío de resolver el problema en 1696, y lo hizo al día siguiente de la publicación en Acta Eruditorum. De hecho, hoy día se conoce bien que la solución es un segmento de una cicloide. Dicha solución fue encontrada independientemente tanto por Leibniz, L’Hôpital, Newton y los hermanos Bernoulli. Johann Bernoulli resolvió el problema considerando el camino de la luz refractada por capas transparentes de densidad variable (Erlichson, H, 1999). En este escrito se expondrá un formalismo alternativo para analizar características de la cicloide así como su relación con el famoso problema del cálculo variacional.
Palabras clave: Cicloide, cálculo variacional.
ABSTRACT
The brachistochrone problem was one of the earliest problems posed in the calculus of variations. Newton was challenged to solve the problem in 1696 and did so the very next day after it was published in Acta Eruditorum. In fact, today it is well known that the solution is a segment of a cycloid. This solution was found by Leibniz, L’Hôpital, Newton, and the Bernoulli’s brothers. Johann Bernoulli solved the problem considering the path of light refracted by transparent layers of varying density (Erlichson, H, 1999). In this work, an alternative formalism is going to be explored to analyze deeply the relationship of the cycloid with the famous problem variational calculus.
Key Words: cycloid, variational calculus.
2010 AMS Mathematics Subject Classification: 01A45, 70H03
La braquistócrona, representa uno de los problemas más famosos en la historia de las matemáticas, de hecho está enmarcado dentro del nacimiento del cálculo variacional

Johann Bernoulli
2. INTRODUCCIÓN
La braquistócrona, representa uno de los problemas más famosos en la historia de las matemáticas, de hecho, está enmarcado dentro del nacimiento del cálculo variacional y en el yacen anécdotas relacionadas con famosos matemáticos de la talla de Galileo Galilei, Issac Newton y de forma especial Johan y Jakob Bernoulli (Boyer, C. B., & Merzbach, U. C. – 2011). El cálculo variacional o cálculo de variaciones como también se le conoce, se enfoca en encontrar una función y(x) para el cual un cierto funcional lineal

sujeto a ciertas condiciones de borde y(a) = ya, y(b) = yb, consiga ser un extremo de un cierto problema bajo la variación respecto a un parámetro. Un cierto funcional tendrá un extremo si al hacer la respectiva variación, el funcional no cambia de signo en una cierta vecindad de la curva y.
Y es que tal vez, el problema de extremar expresiones como (1), no es muy natural, pero el considerar variaciones es un hecho que es familiar en los cursos de cálculo unidi- mensional y multivariable al querer extremar una función, área, volumen etc. El cálculo de variaciones es una de las materias más ricas y fascinantes de las matemáticas. Una razón de ello, es que las ecuaciones fundamentales de la física, en mecánica, electromagnetismo, relatividad general, etc nacen a partir de un principio variacional. Dentro del cálculo variacional, se abordan problemas como encontrar la curva que al revolucionarla sobre uno de los ejes coordenados se genera una superficie de área mínima, o la búsqueda de la trayectoria que minimiza la distancia entre dos puntos en el plano XY. Entre todos estos problemas, se encuentra uno formulado por Johan Bernoulli en 1696
Encuentre la forma de ir de un punto A a un punto B en el plano, tal que cuando la partícula sea liberada del reposo desde A sin fricción, esta llegue a B en el menor tiempo posible.
El anterior enunciado representa el problema de la braquistócrona, βρaχlστoc braquistos «él más corto”, χρovc cronos “intervalo de tiempo”, la curva entre dos puntos en el plano que se recorre en el menor tiempo posible. Si observamos la Figura 1 y pensamos en todas las posibles curvas que lleva a una cierta partícula desde un punto A , a un punto B, el problema se refiere en ver por cuál de todas las curvas de la figura anterior la partícula debe irse para emplear el menor tiempo posible. Dentro de los cursos básicos de mecánica clásica es casi imposible no abordar el problema de la braquistócrona, y si bien es cierto que es un problema clásico, la manera de abordarlo esta enfocado en obtener la ecuación paramétrica de la curva que minimiza al funcional, punto que no permite explorar detalles de tipo geométrico más específicos. Uno de estos es por ejemplo, ver que el funcional relacionado con el problema en cuestión, satisface que F(y) sin(θ) = cte donde el termino F (y) está relacionado justamente con que la partícula esté sometida únicamente por acción de la fuerza gravitacional terrestre. Así mismo, se expondrá que existe una relación entre el punto de tangencia de la cicloide y la distancia vertical y a la que la partícula se encontrará en un determinado momento del descenso.
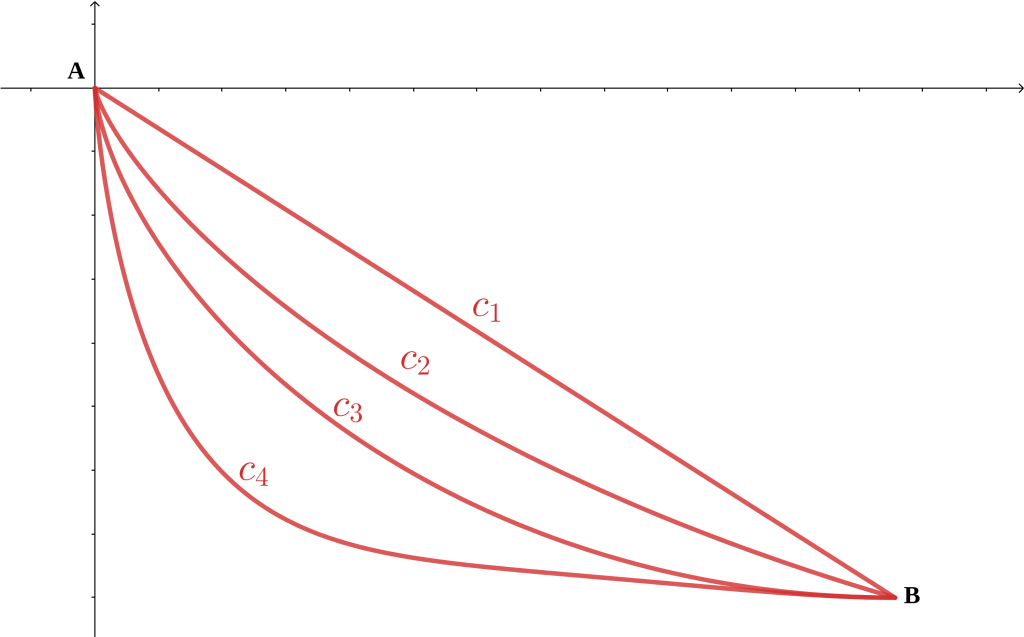
Figura 1: Posibles caminos de ir desde A hasta B
Basado en lo anterior, este escrito, tiene dos objetivos, el primero dar a conocer un análisis basado en condiciones geométricas que satisface la cicloide para el problema variacional de la braquistócrona (Levi, M, 2014) y dos, hacer una revisión de los hechos, fundamentos y desarrollos físicos-matemáticos detrás de la deducción de la curva que hace válido el enunciado, así como varios resultados generales del cálculo variacional (Marion, J. B, 2013 – Goldstein, H., Poole, C. P., & Safko, J. L, 2002). Dentro de lo anterior, es importante destacar que fueron muchos científicos que dedicaron parte de su investigación a dicho problema, Galileo Galilei, Isaac Newton y los hermanos Bernoulli, y lo que se pretende es resaltar el trabajo de ellos. También, se quiere ofrecer un material para el estudio de dicho problema en los cursos de mecánica clásica y por tanto este está ordenado como sigue: En la Sección 2, se hará una breve revisión de las definiciones y resultados del cálculo variacional. En la siguiente sección se abordan los formalismos Newtonianos y Lagrangianos en donde se resaltarán las cantidades que se analizan bajo cada formalismo, seguidamente en la Sección 4, se iniciará el análisis de los aspectos y resultados más importantes en torno al problema de la braquistócrona y por último en la Sección 5, se analizará el enfoque dado por Johan Bernoulli.
3. PRINCIPIOS DEL CÁLCULO DE VARIACIONES
Esta sección está dedicada a revisar conceptos del análisis funcional y muy específica- mente aquellos relacionados con el cálculo de variaciones.
Definición 1 (Funcional lineal). Un funcional lineal es un mapeo lineal de un espacio de funciones a números reales

donde F denota un espacio de funciones. Entre algunos ejemplos de espacios de funciones podemos mencionar,
- El espacio de las funciones continuas sobre un intervalo [a, b].
- C1[a, b], espacio de las funciones reales de variable real continua y derivada continua sobre un intervalo cerrado.
- Los espacios vectoriales normados Lp
Ahora bien, el punto es entender primeramente lo que significa encontrar el extremo de un funcional. La palabra extremo fue introducida por Paul du Bois-Reymond (7), y el objetivo de dicho termino fue concentrar en una sola palabra el que cierta función o en este caso funcional tuviese un máximo o un mínimo1. En lo que sigue abordaremos el formalismo que permitirá entender el significado de la extensión de la búsqueda de extremos para funcionales lineales.
1 Leonhard Euler, fue uno de los primeros en tratar el estudio de los problemas de variaciones
2.1 Cálculo de variaciones y la ecuación de Euler
Consideremos nuevamente un funcional como en (1). La idea detrás de la búsqueda del extremo de un funcional, es análoga a la idea del cálculo, analizar qué ocurre tras definir que la primera derivada del funcional sea igual a cero. De alcanzar el funcional un extremo, este entonces debe variar en una cierta vecindad de la función y(x) hasta alcanzar dicho extremo. Es decir, para todas las posibles funciones y una representación paramétrica de ello es

tal que, para α = 0, y(0, x) = y(x) es la función que alcanza un extremo para J y α, se entiende como el parámetro de perturbación. La función η(x) es una función con primera derivada continua que se anula en los extremos, es decir la variación debe ser idéntica a y(x) en x1 y x2, esto es

Ahora bien, bajo lo anterior la expresión (1) resulta

Proposición 1. La condición que de que, la integral anterior tenga un valor extremo, es que J sea independiente de α a primer orden a lo largo de una trayectoria dada. Esto se traduce en analizar que

para todas las funciones η(x).
Para determinar la interpretación de la condición en (6) se debe realizar la respectiva diferenciación. Veamos

teniendo en cuenta que lo límites de integración están fijos, la diferenciación afecta solo el integrando

Ahora bien, definiendo

sustituyendo, y recordando que la función se anula en los extremos del intervalo, la diferenciación resulta

La integral en la ecuación anterior, es ahora independiente de, sin embargo, tanto y como y0 dependen de pero por la condición en (6) J debe anularse para el valor extremo y como (x) es una función arbitraria, el integrando debe anularse para = 0, resultando

La ecuación anterior, es el resultado de interpretar lo que significa ser un extremo en el contexto del cálculo de variaciones. Es decir, analizar el que el funcional J tenga una curva crítica (un extremo) lleva a resolver finalmente una ecuación diferencial de segundo orden para la variable x en este caso. Dicha ecuación, recibe el nombre de la ecuación de Euler.
En lo que sigue es necesario extender dicho resultado para el contexto de la Mecánica Lagrangiana.
4. LA MECÁNICA BAJO NEWTON Y LAGRANGE
El estudio de la dinámica de los cuerpos está fundamentado en las leyes de la mecánica. Dentro del abordaje de sistemas mecánicos se pueden considerar varios formalismos, bajos que se pueden estudiar y analizar dicho sistema para varias partículas. El más estudiando en los cursos básicos de física, así como el más puesto en práctica es el formalismo Newtoniano. El formalismo de Newton está fundamentado sobre el análisis de cantidades vectoriales como las fuerzas. Dicho formalismo se fundamenta bajo los postulados Newtonianos, dentro de los cuales se encuentra la famosa ecuación

Ahora bien, a través de las ecuaciones de fuerza para un cierto sistema mecánico, es posible analizar si dichas fuerzas modifican o no el estado de reposo o velocidad constante del objeto en estudio es decir, es posible estudiar ciertas cantidades cinemáticas asociadas a él. Sin embargo, la imposibilidad de poder obtener información sobre los vínculos o condiciones que la geometría del problema pueda traer sobre las ecuaciones de movimiento, lleva a considerar otros mecanismos de estudio. El formalismo Lagrangiano, se basa en el cálculo variacional para el desarrollo general del mismo. En este caso, se cuenta con un funcional lineal denominado funcional acción S [10]

donde L = T V , se define como el Lagrangiano del sistema, T la energía cinética y V la energía potencial. Luego así, bajo este formalismo se pasa de analizar cantidades vectoriales a analizar cantidades netamente escalares, las cuales permiten incorporar a través de las coordenadas, vínculos que provienen de la geometría del problema [10, 8]
Ahora bien, tal como en un problema de optimización, existen condiciones bajo las cuales se extrema (o se hacen variaciones) dicho funcional y para el caso de (13), se considera un principio establecido por Willian R Hamilton conocido como el principio de Hamilton o principio de mínima acción.
De todas las trayectorias sobre las cuales un sistema dinámico pueda moverse desde un punto a otro en el espacio de coordenadas dentro de un intervalo de tiempo, la trayectoria óptima es aquella que minimiza la integral en el tiempo de la función Lagrangiana del sistema.
El punto clave está, en establecer un problema análogo al presentado en la sección (2), es decir un problema variacional teniendo en cuenta al principio de Hamilton para minimizar a S. Para ello considerando, que la función Lagrangiana dependa tanto de las coordenadas como de las velocidades generalizadas qj y q˙j; es decir

Que la acción se mínima, es decir cumplir el principio de Hamilton, se traduce en

donde la variación en este caso se denota por δ. Ahora bien, el punto es conectar con lo establecido dentro del cálculo variacional. Al considerar las variaciones respecto a cada una de las coordenadas y velocidades generalizadas, el encontrar la trayectoria óptima vía el principio de Hamilton se traduce en resolver un conjunto de ecuaciones análogas a las ecuaciones de Euler. Estas ecuaciones son para el caso de considerar un Lagrangiano, las conocidas ecuaciones de Euler-Lagrange [10]

5.. LA BRANQUISTÓCRONA
Preguntarnos por cuál es la curva que una partícula recorre en el menor tiempo posible, es claramente un problema de optimización. Sin embargo, condiciones de que el recorrido se haga solo por acción de gravedad, conlleva a tener en cuenta ciertos aspectos como por ejemplo, el principio de conservación de la energía. Hoy en día se sabe que la curva que satisface lo anterior, es la cicloide y que dicha curva se obtiene a través de un principio variacional. Pero más allá de reproducir los pasos para llegar a la ecuación paramétrica de dicha curva, lo interesante es explorar el por qué la cicloide cumple con las condiciones citadas en el enunciado del problema y sobre todo analizar el procedimiento y argumentos usados por Johan Bernoulli para la deducción de la solución al problema.
4.1 Algunos preliminares y resultados
La física se basa en el estudio de los fenómenos de la naturaleza. Bien sabemos, que ello no son más que manifestaciones de las interacciones fundamentales, gravedad, electromagnetismo, interacción fuerte y débil. Sin embargo, dicho estudio o análisis se hace a partir de las ecuaciones de movimiento de los campos fundamentales de cada interacción, y es un principio variacional sobre el funcional de la teoría que establece el puente entre la teoría y las ecuaciones de movimiento. Luego teniendo en cuenta lo descrito en la Sección 2 sobre el principio variacional y su rol en el formalismo Lagrangiano, dentro de todos los posibles funcionales en este escrito se abordan aquellos de la forma

Observación 1. Note que el Lagrangiano en (17), es la distancia Euclídea con un cierto peso dado por la función F (y). Este tipo de Lagrangianos están presentes en muchos de los problemas clásicos del cálculo variacional [9].
A continuación, veremos uno de los resultados más importantes en este trabajo. Dicho teorema establece una conexión geométrica con la cicloide y Lagragianos del tipo (17)
Teorema 1. Sea y la curva crítica de un problema variacional definida desde un punto A a un punto B. Lagrangianos del tipo (17), satisfacen que

ó equivalentemente F (y) sin(θ) = cte, donde θ es el ángulo entre la tangente y el eje Y [9].
Primeramente, veamos que para Lagrangianos de la forma (y, y′), se satisface la segunda forma de las ecuaciones de Euler-Lagrange [10], cumpliendo que

donde Ly‘ denota la derivada de L respecto a y′.
En efecto, consideremos

Por otro lado,

combinando (21) y (20), resulta

identificando a (16), se obtiene que

Luego, cuando L no dependa de x, resulta finalmente (19).
Ahora bien, aplicando dicho resultado para el caso del Lagrangiano dado por (17) resulta

que luego de cierta manipulación algebraica se llega a que el Lagrangiano (17) en efecto satisface (18). Finalmente, para obtener la forma alternativa, note de la Figura 2 que la tangente de la curva se expresa a través de

y que usando su definición a través de sin(π/2 θ) y cos(π/2 θ) se llega a que y′ = ctg(θ). Ahora bien, sustituyendo esta última expresión en (18), se obtiene finalmente lo deseado [4] .
Por otro lado, tal y como se comentó anteriormente en lo que sigue se mostrará que la curva crítica para un funcional de la forma (17) es la cicloide. El punto es que en vista de que (17) satisface la condición dada por (18) o su forma equivalente, lo que mostraremos en el fondo es que la cicloide satisface que F (y) sin(θ) = cte. Para ello y pro de construir el funcional, consideremos el principio de conservación de energía para un sistema de una partícula sometida únicamente al campo de fuerza de gravedad. A partir del principio de conservación de la energía tenemos la siguiente expresión


Luego, considerando que la partícula se libera del reposo (en donde se tomó en cuenta que en ese punto E = 0, punto de mínima energía) y resolviendo para v se obtiene que

obteniéndose que la velocidad está determinada por la altura y.
Por otro lado, retomando el enunciado, el objetivo es minimizar el tiempo, luego el funcional a minimizar vendrá como

donde k = 1/√2g. Luego (28) es del tipo de Lagrangianos como (17) en donde F (y) = 1/√y, así entonces se cumple la condición dada por (18).
Veamos que en efecto la curva y cumple dicha condición
Consideremos que la curva con la que se emplea el menor tiempo posible, (la curva crítica) es un arco de una cicloide la cual se genera por un punto sobre un círculo rodando sin deslizar (ver Figura 3). Por otro lado, tomemos que y(A) > y(B) (ver Figura 2)2 donde el punto A es el punto inicial de la partícula y P un punto en un tiempo posterior. Así mismo, consideremos la recta tangente al punto P con θ siendo el ángulo entre la altura y y dicha recta tangente. Luego, por relación de ángulos se tiene que

es decir que

y como PQ ⊥ PQ′, se llega a que (30) se reescribe como

o como se desea expresar

siendo D el diámetro de la circunferencia.
Lo que se acaba de mostrar bajo argumentos geométricos es que el arco de la cicloide satisface las condiciones para minimizar al funcional (28). Por otro lado, note que el punto de tangencia P es el punto de velocidad instantánea v = √2gy y que depende directamente de la distancia vertical y, que va desde el punto P al punto de contacto K, la cual no es otra que la proveniente del principio de conservación de energía. Así mismo, hay un punto aún más importante que resaltar y es el hecho de que dentro del procedimiento estándar para abordar la braquistócrona la dependencia de la velocidad con la distancia vertical y no es tomada en cuenta. La razón de ello, es que consideran que el campo gravitacional solo actúa a lo largo de la dirección X, trayendo como consecuencia que el funcional lineal solo dependa de y′ [10]. Ahora bien, la ventaja de abordar el problema de la forma anterior es que permite una integración directa y así obtener la ecuación paramétrica de la cicloide vía las ecuaciones de Euler-Lagrange. Sin embargo, como se comentó, dicho procedimiento pierde el detalle de la dependencia de la velocidad con la distancia vertical a medida que la partícula va descendiendo por acción de gravedad.
2 Para que pueda existir el arco de la cicloide
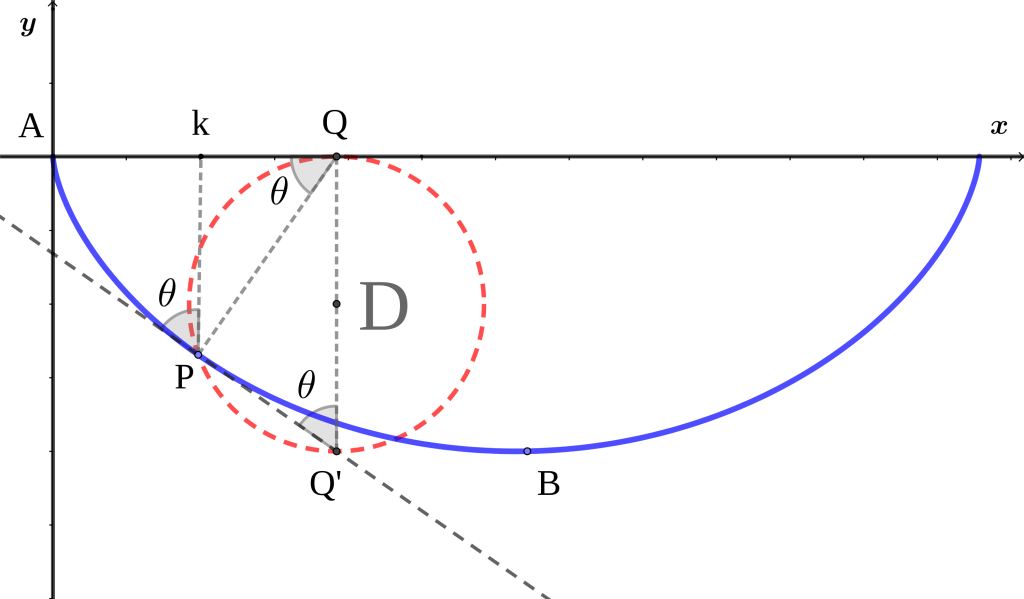
Figura 2. Características geométricas de la curva cicloide.
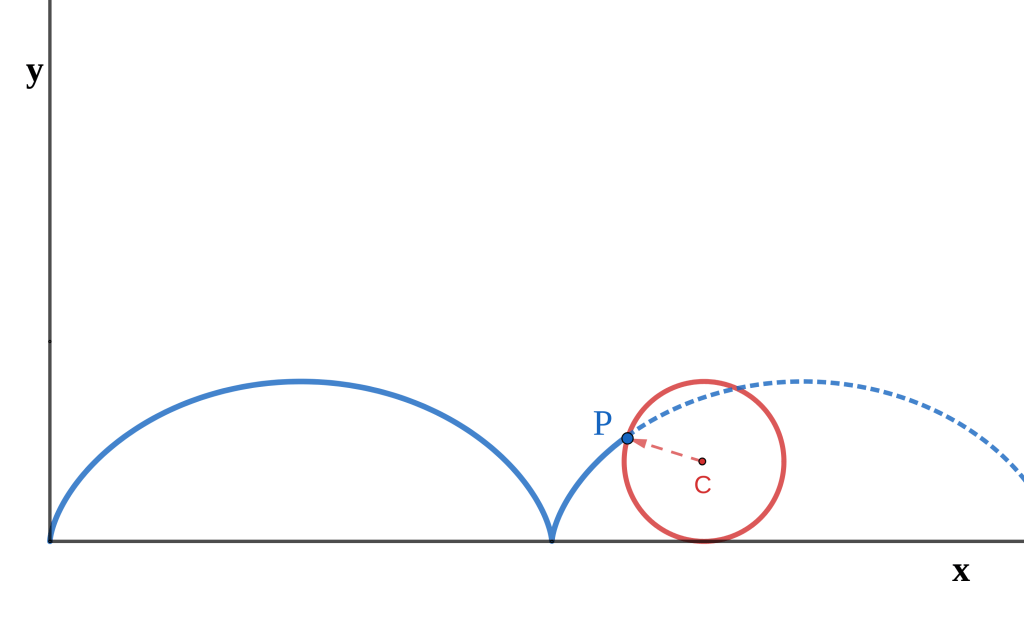
Figura 3. Formación de la cicloide a través del desplazamiento de un círculo sin deslizar
6. LA DEDUCCIÓN DE JOHAN BERNOULLI
Entre 1682 y 1782 Acta Eruditorum—la primera revista científica publicada en idioma alemán—una revista dedicada a ciencias naturales y matemática, fue el soporte para los trabajos de grandes científicos como Pierre Simon Laplace, Leonhard Euler, Jakob y Johan Bernoulli entre otros. Libros, artículos, resúmenes son parte de los aportes que se hacían en dicha revista y en 1696 Johan Bernoulli, publica un siguiente problema
“Determinar la curva entre las infinitas posibles por la que un cuerpo desciende en el menor tiempo posible entre dos puntos que no están en la misma posición vertical ni horizontal movido únicamente por efecto de la gravedad «
Este problema ya había sido abordado 60 años antes por Galileo Galilei 3 sin aún tener las técnicas del cálculo de Leibniz. De todas las respuestas que se recibieron la más acertada fue la enviada por L’Hôpital en donde este establecía que dicha curva era la cicloide [2]. Sin embargo, el enfoque propuesto en la solución por Johan Bernoulli no solo era elegante sino que no apelaba a principios o argumentos relacionados directamente con la geometría, en su análisis Bernoulli apeló a un principio óptico, la ley de Snell.
5.1. La ley de Snell y la branquistócrona
En óptica un problema muy conocido es el poder establecer la trayectoria de un rayo de luz en medios con diferentes densidades. En este contexto, el principio de Fermat [3] establece que la luz va de un punto A a un punto B siguiendo la trayectoria que menos tiempo le lleve hacerlo.4 Teniendo en cuenta lo anterior, consideremos un medio óptico [2] en el plano (x, y) con c(y) como la velocidad de la luz en la dirección y. ley de Snell [3] establece que por cada rayo, el seno del ángulo con la dirección y (ver Figura 4) varía respecto a la velocidad de la luz, es decir

En la solución de Bernoulli, se unifican tanto le principio de Fermat como la ley de Snell. En este enfoque, se considera que el medio por donde se traslada la partícula está dividido en varias “capas»(ver Figura 4) y que la velocidad de la partícula viene dada por (27). Así entonces, considerando los posibles diferentes medios tomados en cuenta por el principio de Fermat, la trayectoria del rayo será aquella que venga de minimizar

la cual será la misma trayectoria de la partícula, pensando en que también quiera recorrer dicha distancia en el menor tiempo posible. Luego, escogiendo que c = √2gy, entonces el rayo de luz encontrará en consecuencia la forma de la braquistócrona. Por otro lado, así como el rayo satisface (33) del mismo modo lo hará la braquistócrona, luego se termina cumpliendo que

Así entonces, si bien es cierto que lo anterior comparado con lo desarrollado en la Sección 3 es diferente en procedimiento el resultado es el mismo. Lo que lleva a resaltar dos hechos, el primero que en efecto el principio de Fermat es un principio variacional y dos que bien sea por los argumentos geométricos abordados anteriormente o por el usado por Bernoulli, la cicloide es quien resuelve el problema de la curva entre dos puntos en el menor tiempo posible.
3 Galileo Galilei, propuso erroneamente que dicha curva era el arco de una circunferencia.
4 Note que el principio de Fermat es básicamente es un principio variacional, un principio para encontrar el camino óptimo para un rayo de luz
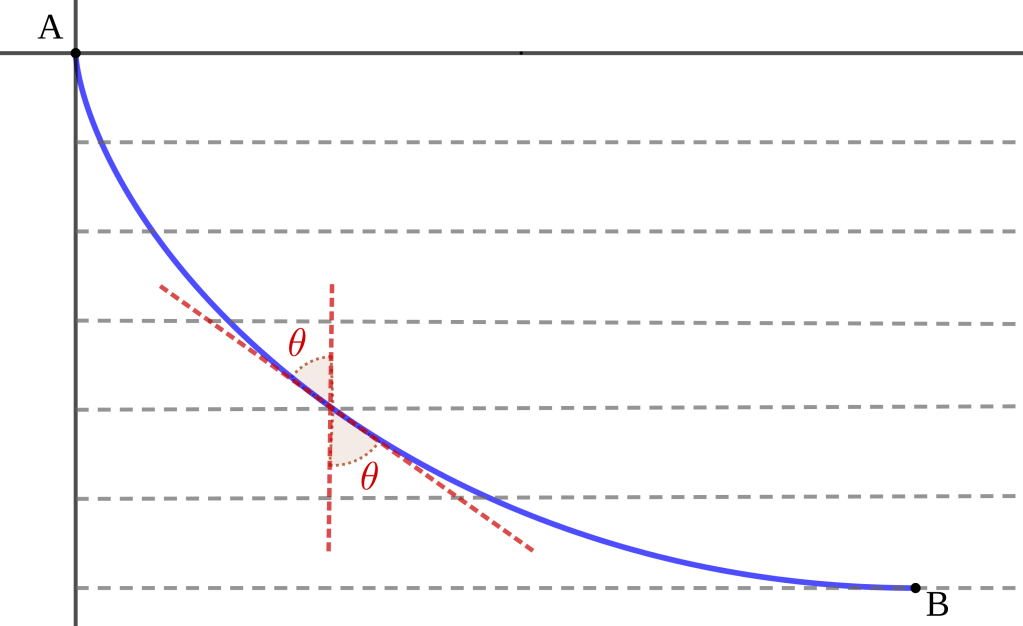
Figura 4. Representación del medio por donde se desplaza la partícula
7. CONCLUSIONES
El proceso de enseñanza está fundamentado sobre varios pilares, pero uno de los más importantes está basado en el poder tener más conocimiento de un cierto problema con el fin de tener posibles nuevos métodos o estrategias para ampliar el dominio sobre el mismo. Dentro de los cursos básicos de mecánica clásica es casi imposible no abordar el problema de la braquistócrona, y si bien es cierto que es un problema clásico, la manera de abordarlo está enfocado en obtener la ecuación paramétrica de la curva que minimiza al funcional más no en explorar detalles más específicos sobre el por qué es la cicloide la curva que satisface el enunciado al problema de la braquistócrona.
En mecánica prácticamente todo se basa en encontrar la ecuación que sigue la tra- yectoria de una partícula y para problemas abordados bajo el formalismo Lagrangiano, el cálculo variacional provee de la herramienta que da respuesta a ello. En este escrito se abordaron aspectos tanto generales como específicos de ciertos tipos de funcionales lineales. Se pudo ver que la curva que minimiza funcionales de la forma

satisface la identidad geométrica dada por F (y) sin(θ) = cte y que justamente el funcio- nal que se busca extremar en el problema de la braquistócrona guarda dicha estructura matemática. Con ello se probó que la curva cicloide es la curva crítica a dicho problema variacional y que ella satisface la identidad anteriormente citada [9]. Así mismo, se exploró el análisis realizado por Bernoulli, en donde se constata que a través del principio de Fermat y el principio óptico de Snell, tanto el rayo de luz como la partícula buscan recorrer el camino en el menor tiempo posible.
Finalmente, es importante recalcar que a pesar de que fueron muchos los matemáticos que aportaron al problema de la braquistócrona, históricamente es la solución de Johan Bernoulli la más interesante y por ello tuvo aquí la relevancia mostrada queriendo de forma clara resaltar la elegancia y simplicidad de la misma.
“Determinar la curva entre las infinitas posibles por la que un cuerpo desciende en el menor tiempo posible entre dos puntos que no están en la misma posición vertical ni horizontal movido únicamente por efecto de la gravedad «
8. REFERENCIAS
Boyer, C. B., & Merzbach, U. C. (2011). A history of mathematics. John Wiley & Sons.
Hajar, E. K., & Eddine, B. O. B. Le problème de Brachistochrone
Dijksterhuis, F. J. (2004). Lenses and waves: Christiaan Huygens and the mathematical science of optics in the seventeenth century (Vol. 9). Springer Science & Business Media.
Simmons, G. F., & Robertson, J. S. (1993). Ecuaciones diferenciales: con aplicaciones y notas históricas.
Erlichson, H. (1999). Johann Bernoulli’s brachistochrone solution using Fermat’s principle of least time. European journal of physics, 20(5), 299.
Goldstein, H., Poole, C. P., & Safko, J. L. (2002). Classical Mechanics, published by Pearson Education.
Kot, M. (2014). A first course in the calculus of variations (Vol. 72). American Mathematical Society.
Cosenza, M. (2015). Mecánica Clásica. Universidad de los Andes (ULA). Facultad de Ciencias. Departamento de Física. Mérida-Venezuela (Publicación Electrónica), 133-141.
Levi, M. (2014). Classical mechanics with calculus of variations and optimal control: an intuitive introduction (Vol. 69). American Mathematical Soc.
Marion, J. B. (2013). Classical dynamics of particles and systems. Academic Press.